
让人形生物“灵巧的手”的机器人
作者:365bet体育注册 发布时间:2025-06-12 10:24
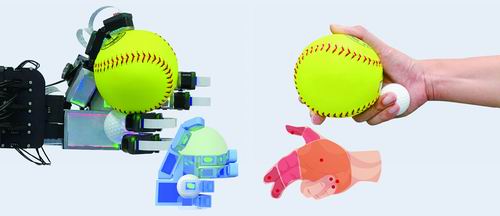 将整个Tentheart与人的手进行比较。 ■记者Zhao Guangli,实习生Zhao Yutan允许机器人拥有不需要人类操纵的手,并且具有灵活的操作能力,例如人类,我们的大学人工智能研究所助理教授Zhu Yixin已任命自己来研究超过三年的研究。今天,研究结果终于结束了。 6月9日,朱Yixin的团队与国内外科学研究团队合作,例如武汉北京大学人工智能研究所和其他国内和外国研究团队“高分辨率的触觉机器人实现了“自然机器智能”。 ”“机器人在不确定环境(例如人民)中保持良好和灵活的操作能力的能力LE对于将机器人应用于家庭,医疗和工业环境至关重要。 “手柄。肌肉在自由中赋予每只手24度的柔韧性。”因此,对人手功能的研究在体现的智力和机器人学的纪律之前。“当服用某事时,人的手将努力两种功能:“触觉反馈”和“运动功能”和“运动功能”:触觉反馈包括触感的触感和触感的感觉,并感觉到触感,并感觉到触感,并感觉到一定的趋势,并且是一定的,一定的触感,一定的触感,一定的触感,一定的触感,一定的触感,一定的触感,一定的触感,一定的触感,一定的触感,并且触感是一定的,并且触摸了一定的触感。接触,质地,肌肤,运动角度的运动角度,以及动态的动力,因为触摸手的动力是如此重要,为什么他们不能握住机器人,而是触摸的动力。运动能力一直是机器人研究领域面临的重大挑战。首先,引入触觉传感器将对机器人运动的灵活性产生重大影响。其次,即使机器人具有具有高分辨率感知能力的功能,如何有效地处理大量触觉数据并使用它来驱动每个关节以切换到高度的自由度来完成诸如人手之类的完整任务,也是“障碍”。这也是Zhu Yixin团队“展示”的一部分。朱Yixin告诉中国科学日报受到人类手的生物结构的启发,他们设计和开发了“基于全手触摸的F-TAC手”(从ThereAit可以通过集成的传感器和设计结构破坏上层瓶颈。整个触手的独特设计是什么?在短时帽子散布在整个皮肤上,并具有一种神经加工机制,该机制专门处理并解释了这种知觉在大脑皮层中的大量建议。 “整个触手都模仿了这种设计。” Zhao Zhi是第一个在北京大学人工智能研究所设置论文和医生研究的人,是北京大学人工智能研究所的医生。 Hang介绍了它们,其中包括6种不同排列中的17个高分辨率触觉传感器,并在“关节”中覆盖它们,允许所有触角都有手指,手指和手掌,可以感觉到物体大小和硬度等物理特性。 Zhao Zihan说,高分辨率触觉传感器占据了机器人棕榈表面的70%,空间分辨率为0.1 mm,“相当于每平方百分之二的近10,000个触觉像素点,使机器人可以执行准确的操作和适应性抓手。”那么,从哪里获得整个Tentheart的灵活抓地力?塞ERET隐藏在细节中。朱Yixin说,团队在每个触觉传感器的前面放置了一个胶片层和微型高速摄像头,使其可以“看到”运动中的轻微变化 - 当整个触手“可见”其自己的操作时,它可以根据情况调整抓取方法。当然,它也不能与算法辅助关系分开。北北京大学人工智能研究所的联合第一作者,医生的学生li yu-yan解释说,他们创建了一种算法来生产基于可能性模型的不同人类爬行技术,涵盖了19个常见类型的人类craw脚。在这一代人的爬网算法的帮助下,量化就像拥有包含不同技术的“手动手册”,为其提供了丰富的爬网选项。 “除了夹紧一个对象外,整个帐篷还可以使用全手高分辨率触觉来预测实施MI造成的事物碰撞的风险在多对象期间进行的赌注及早处理,并将运动方法调整到时间上。当在实际环境中检测到风险时,可以检测到整个触手,并在大约100毫秒内迅速移动。 “李阳说,”我们的算法支持从常用的'强度 - 授权'到“准确抓住”的所有帐篷帐篷的大量实施。 “值得一提的是,整个触手的整体设计还有另一个聪明的想法:传感器被设计为“注意到元素和结构”的精神成功的成功实地援助,Zhao Zong表示,所有这些设计都可以看到所有这些帐篷可以确保能够看到的无效数据与System Sy Syste Shave Syste Shave Syste Muspect Fecords caption 5%caption 5 efters caption 5 efters caption 5 na。提供一个新的观点来了解智力的性质。团队是世界上第一个机器人手系统,对研究笔记中所有手中的高分辨率和完整的运动能力都具有相同的了解。正是由于这种情况,与此结果的论文检查速度是因为主体超出了朱Yixin的想象。 “被确认在提交文件后150天被接受。”朱Yixin认为,他们的研究不仅是技术的成功,而且还为理解智力本质提供了新的观点。 “人类的智力植根于对身体的理解能力,尤其是手的触觉体验,对我们的临时世界很重要。”朱Yixin说,“整个帐篷帐篷的结果表明,还需要对能力的丰富理解,也需要对机械智能的发展进行基于大型语言模型的人工智能培训。S做出了重大发展,但是在现实世界中,在理解和互动机器人方面仍然存在许多缺点。“我总是有一个目标,这将使机器人更加聪明,更笼统。” Zhao Zihan自年轻以来就对机器人感兴趣,他的本科专业的专业的电子机械工程专业为它提供了一个很好的互动互动的基础。至少需要一个闭环反馈系统,触摸可以直接反馈机器人和物体之间的互动状态。从真正意义上讲。 “相关论文信息:https://dii.org/10.1038/s42256-025-01053-3
将整个Tentheart与人的手进行比较。 ■记者Zhao Guangli,实习生Zhao Yutan允许机器人拥有不需要人类操纵的手,并且具有灵活的操作能力,例如人类,我们的大学人工智能研究所助理教授Zhu Yixin已任命自己来研究超过三年的研究。今天,研究结果终于结束了。 6月9日,朱Yixin的团队与国内外科学研究团队合作,例如武汉北京大学人工智能研究所和其他国内和外国研究团队“高分辨率的触觉机器人实现了“自然机器智能”。 ”“机器人在不确定环境(例如人民)中保持良好和灵活的操作能力的能力LE对于将机器人应用于家庭,医疗和工业环境至关重要。 “手柄。肌肉在自由中赋予每只手24度的柔韧性。”因此,对人手功能的研究在体现的智力和机器人学的纪律之前。“当服用某事时,人的手将努力两种功能:“触觉反馈”和“运动功能”和“运动功能”:触觉反馈包括触感的触感和触感的感觉,并感觉到触感,并感觉到触感,并感觉到一定的趋势,并且是一定的,一定的触感,一定的触感,一定的触感,一定的触感,一定的触感,一定的触感,一定的触感,一定的触感,一定的触感,并且触感是一定的,并且触摸了一定的触感。接触,质地,肌肤,运动角度的运动角度,以及动态的动力,因为触摸手的动力是如此重要,为什么他们不能握住机器人,而是触摸的动力。运动能力一直是机器人研究领域面临的重大挑战。首先,引入触觉传感器将对机器人运动的灵活性产生重大影响。其次,即使机器人具有具有高分辨率感知能力的功能,如何有效地处理大量触觉数据并使用它来驱动每个关节以切换到高度的自由度来完成诸如人手之类的完整任务,也是“障碍”。这也是Zhu Yixin团队“展示”的一部分。朱Yixin告诉中国科学日报受到人类手的生物结构的启发,他们设计和开发了“基于全手触摸的F-TAC手”(从ThereAit可以通过集成的传感器和设计结构破坏上层瓶颈。整个触手的独特设计是什么?在短时帽子散布在整个皮肤上,并具有一种神经加工机制,该机制专门处理并解释了这种知觉在大脑皮层中的大量建议。 “整个触手都模仿了这种设计。” Zhao Zhi是第一个在北京大学人工智能研究所设置论文和医生研究的人,是北京大学人工智能研究所的医生。 Hang介绍了它们,其中包括6种不同排列中的17个高分辨率触觉传感器,并在“关节”中覆盖它们,允许所有触角都有手指,手指和手掌,可以感觉到物体大小和硬度等物理特性。 Zhao Zihan说,高分辨率触觉传感器占据了机器人棕榈表面的70%,空间分辨率为0.1 mm,“相当于每平方百分之二的近10,000个触觉像素点,使机器人可以执行准确的操作和适应性抓手。”那么,从哪里获得整个Tentheart的灵活抓地力?塞ERET隐藏在细节中。朱Yixin说,团队在每个触觉传感器的前面放置了一个胶片层和微型高速摄像头,使其可以“看到”运动中的轻微变化 - 当整个触手“可见”其自己的操作时,它可以根据情况调整抓取方法。当然,它也不能与算法辅助关系分开。北北京大学人工智能研究所的联合第一作者,医生的学生li yu-yan解释说,他们创建了一种算法来生产基于可能性模型的不同人类爬行技术,涵盖了19个常见类型的人类craw脚。在这一代人的爬网算法的帮助下,量化就像拥有包含不同技术的“手动手册”,为其提供了丰富的爬网选项。 “除了夹紧一个对象外,整个帐篷还可以使用全手高分辨率触觉来预测实施MI造成的事物碰撞的风险在多对象期间进行的赌注及早处理,并将运动方法调整到时间上。当在实际环境中检测到风险时,可以检测到整个触手,并在大约100毫秒内迅速移动。 “李阳说,”我们的算法支持从常用的'强度 - 授权'到“准确抓住”的所有帐篷帐篷的大量实施。 “值得一提的是,整个触手的整体设计还有另一个聪明的想法:传感器被设计为“注意到元素和结构”的精神成功的成功实地援助,Zhao Zong表示,所有这些设计都可以看到所有这些帐篷可以确保能够看到的无效数据与System Sy Syste Shave Syste Shave Syste Muspect Fecords caption 5%caption 5 efters caption 5 efters caption 5 na。提供一个新的观点来了解智力的性质。团队是世界上第一个机器人手系统,对研究笔记中所有手中的高分辨率和完整的运动能力都具有相同的了解。正是由于这种情况,与此结果的论文检查速度是因为主体超出了朱Yixin的想象。 “被确认在提交文件后150天被接受。”朱Yixin认为,他们的研究不仅是技术的成功,而且还为理解智力本质提供了新的观点。 “人类的智力植根于对身体的理解能力,尤其是手的触觉体验,对我们的临时世界很重要。”朱Yixin说,“整个帐篷帐篷的结果表明,还需要对能力的丰富理解,也需要对机械智能的发展进行基于大型语言模型的人工智能培训。S做出了重大发展,但是在现实世界中,在理解和互动机器人方面仍然存在许多缺点。“我总是有一个目标,这将使机器人更加聪明,更笼统。” Zhao Zihan自年轻以来就对机器人感兴趣,他的本科专业的专业的电子机械工程专业为它提供了一个很好的互动互动的基础。至少需要一个闭环反馈系统,触摸可以直接反馈机器人和物体之间的互动状态。从真正意义上讲。 “相关论文信息:https://dii.org/10.1038/s42256-025-01053-3 下一篇:没有了